
Date: Tuesday 31st March 2026
Overview of Event:
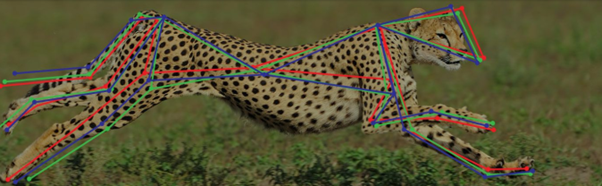
Animals are extremely agile and exhibit complex social dynamics in the wild. However, obtaining high-fidelity data to understand exactly how they manoeuvre and interact remains a significant challenge. Traditional methods often rely on invasive tracking collars or are restricted by the limitations of captive environments. In this talk, I will discuss how applying principles from robotics can help overcome these hurdles to provide novel tools for studying wildlife. Focusing primarily on the cheetah, the pinnacle of terrestrial manoeuvrability, our lab develops a broad range of techniques including multi-body modelling, computer vision, and the design of physical robots to gain a comprehensive view of locomotion. By leveraging bespoke embedded systems and sensor fusion, such as our WildPose tracker, we can now perform 3D markerless pose estimation on uncooperative subjects in their natural habitats. This technological leap not only provides deeper insights into predator and prey interactions, but it also scales to allow the non-invasive study of collective animal behaviour with unprecedented detail. Ultimately, these advanced tracking methods have far-reaching implications for ecology and evolutionary biology, spanning from the analysis of hunting energetics to tracking the spatial dynamics and transmission of zoonotic diseases within populations.
Speakers: Amir Patel (Associate Professor in Robotics and AI, UCL)
I’m an Associate Professor at UCL, where I study how animals achieve agility and speed and then apply those insights to robotics. My background is in mechatronics engineering, and I began my career as a flight control engineer before moving into animal biomechanics. Over time, my work has expanded to include sensor fusion, computer vision, and optimal control—all aimed at measuring and modeling locomotion in real-world conditions. I collaborate with conservationists, biologists, and fellow engineers to understand factors like spine flexibility and tail dynamics in animals. In parallel, I translate those biological principles into more capable robots, focusing on practical applications in fields such as ecology, disease monitoring, and sports science. My research has been recognized by awards such as the Google Research Scholar Award and the MathWorks Research Award, but my main motivation is to uncover how living systems move and adapt, and to channel that knowledge toward useful, real-world technologies.

Location: ZOOLOGY MUSEUM (129), WALLACE BUILDING
Contact Information: Andrew King (a.j.king@swansea.ac.uk)